Образовательные программы и оборудование для изучения основ программирования современной робототехники на базе мета-операционной системы Robot Operating System.
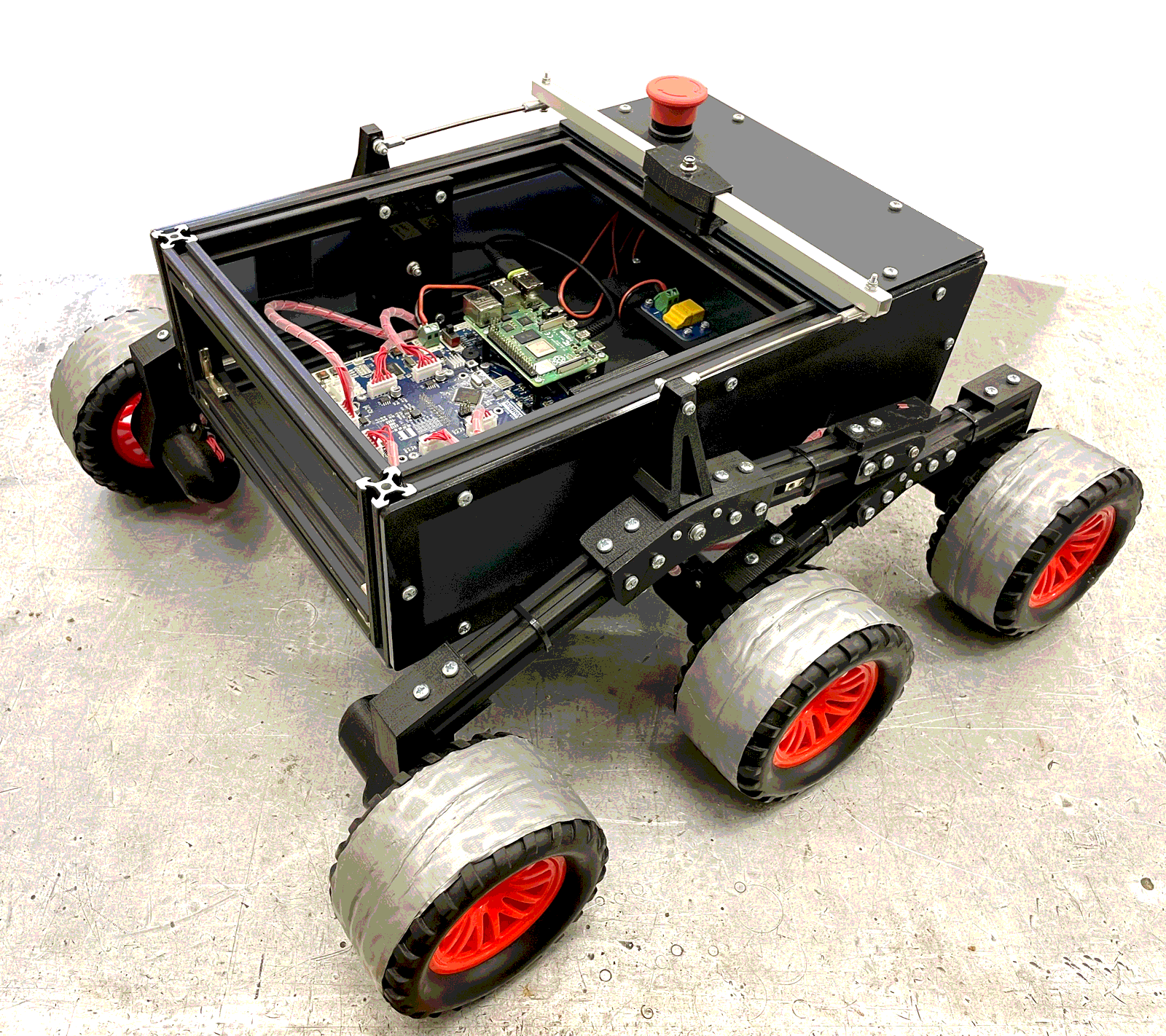
Корпус устойчивый к внешним воздействиям 6-колесная робототехническая платформа способная передвигаться по любым твердым поверхностям и открытому грунту тип подвески - рокерная элементы освещения одноплатный компьютер с 4-ядерным процессором интегральная плата управления с микроконтроллерами типа STM32F4 лазерный лидар с углом сканирования 360 град инерционный датчик IMU 10DOF набор компонентов для подготовки к соревнованиям по робототехнике
Комплект ручного инструмента в составе ключа, инструмента для обжимки специализированных кабелей колесной робототехнической платформы, мультиметра, пинцета, длинногубцев, набора специализированных кабелей, стяжек, карта памяти, карт-ридер, набор разъемов и гильз, рулетка, ящик для хранения, набор отверток
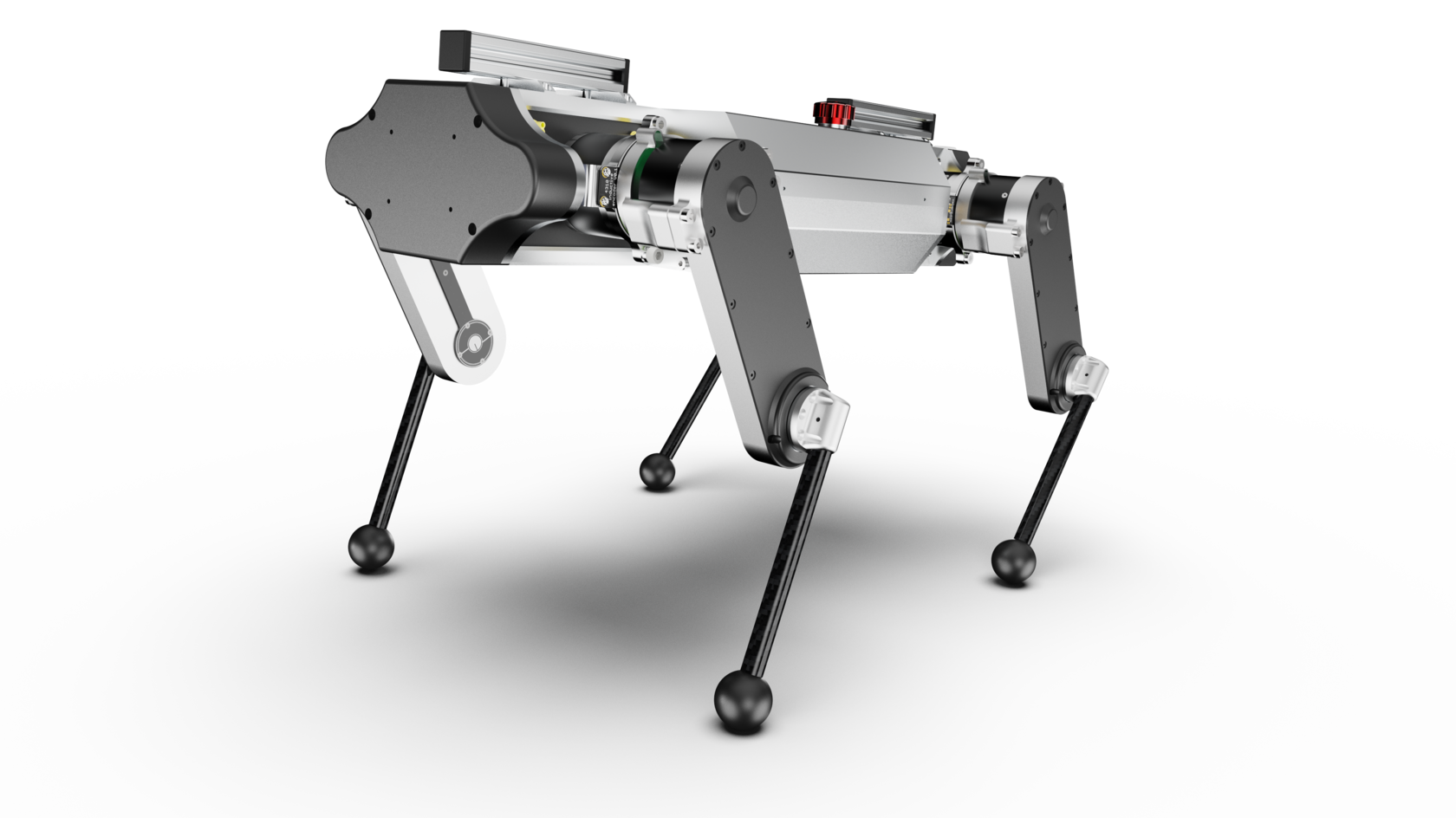
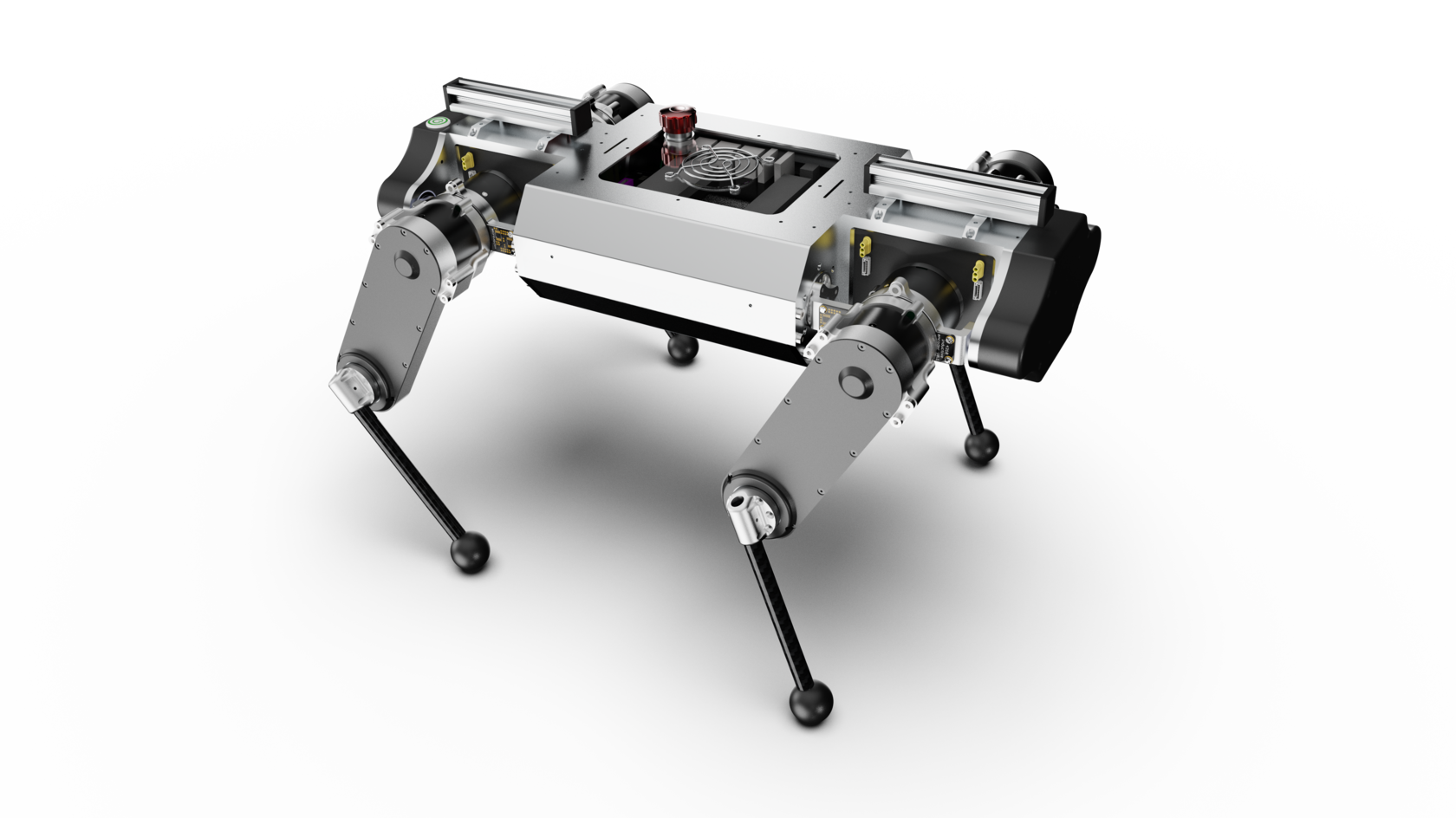
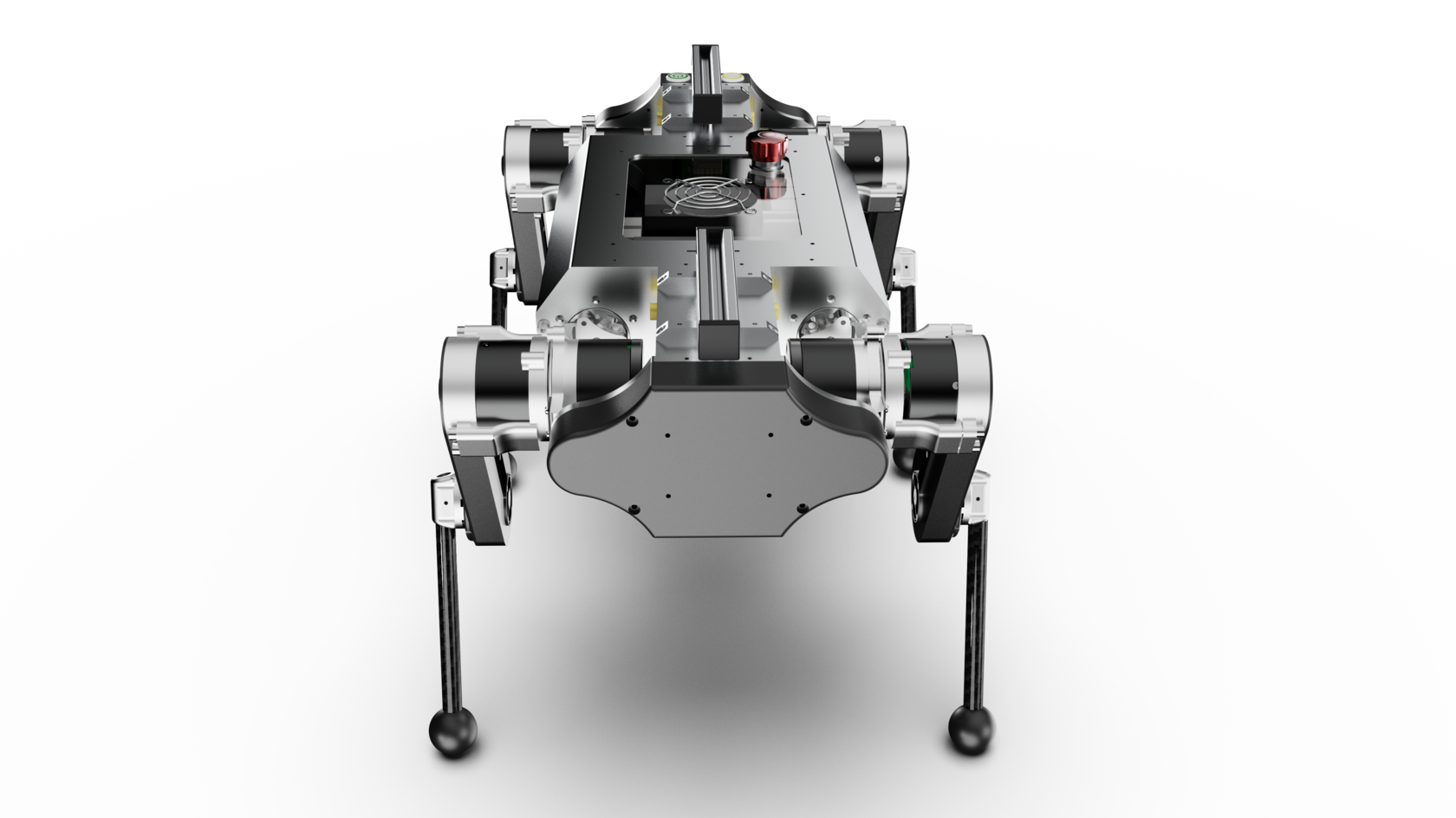
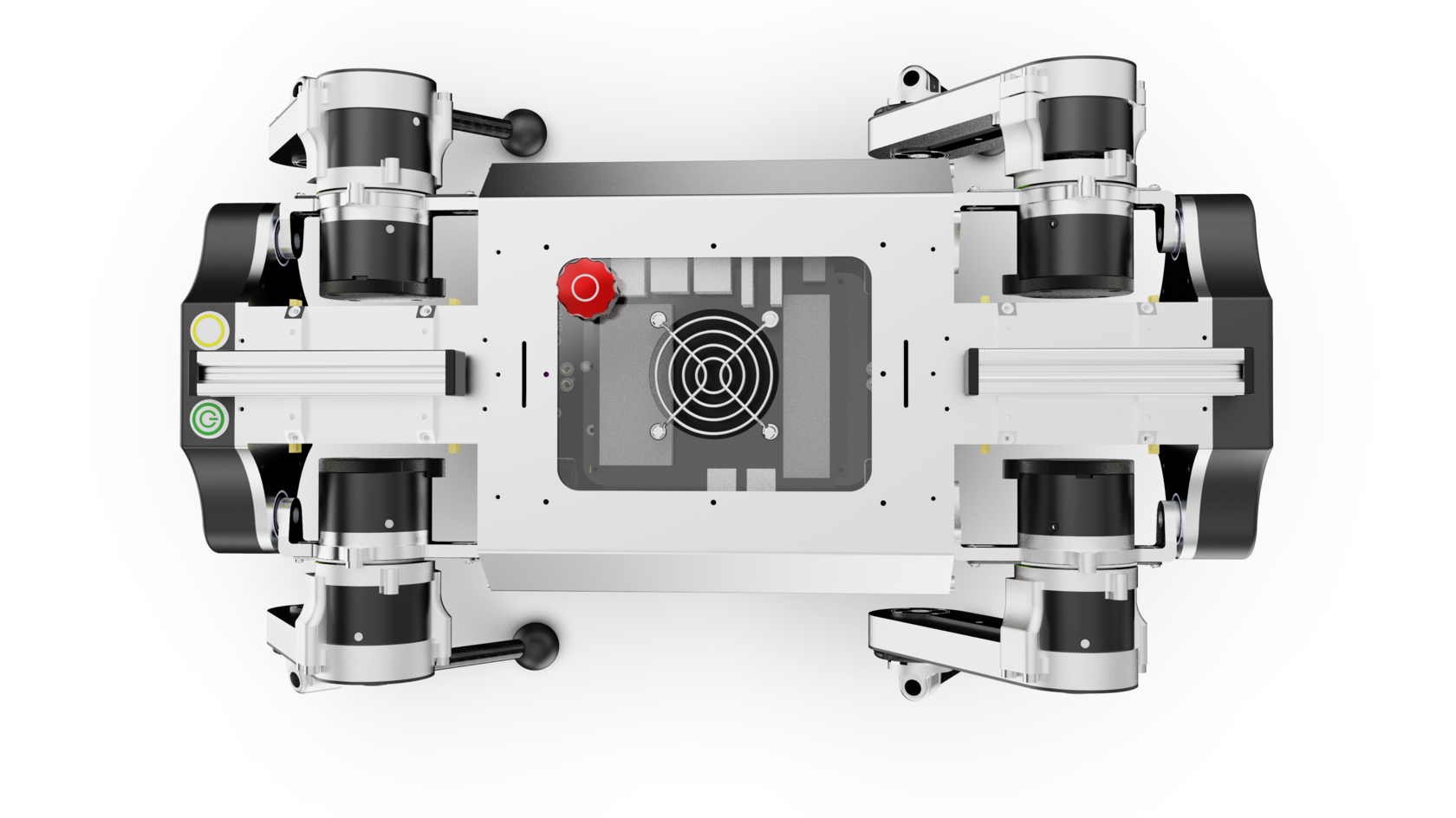
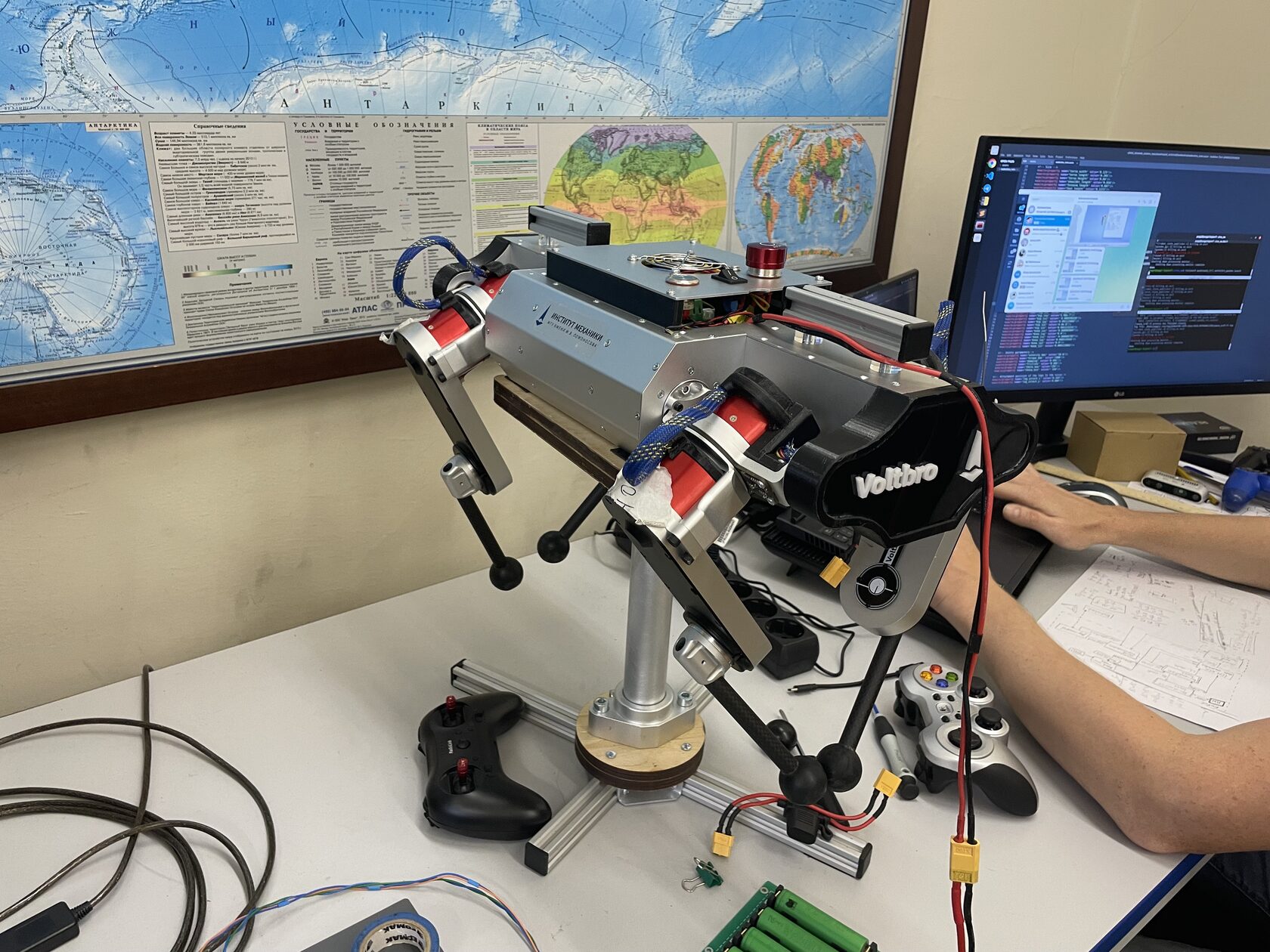
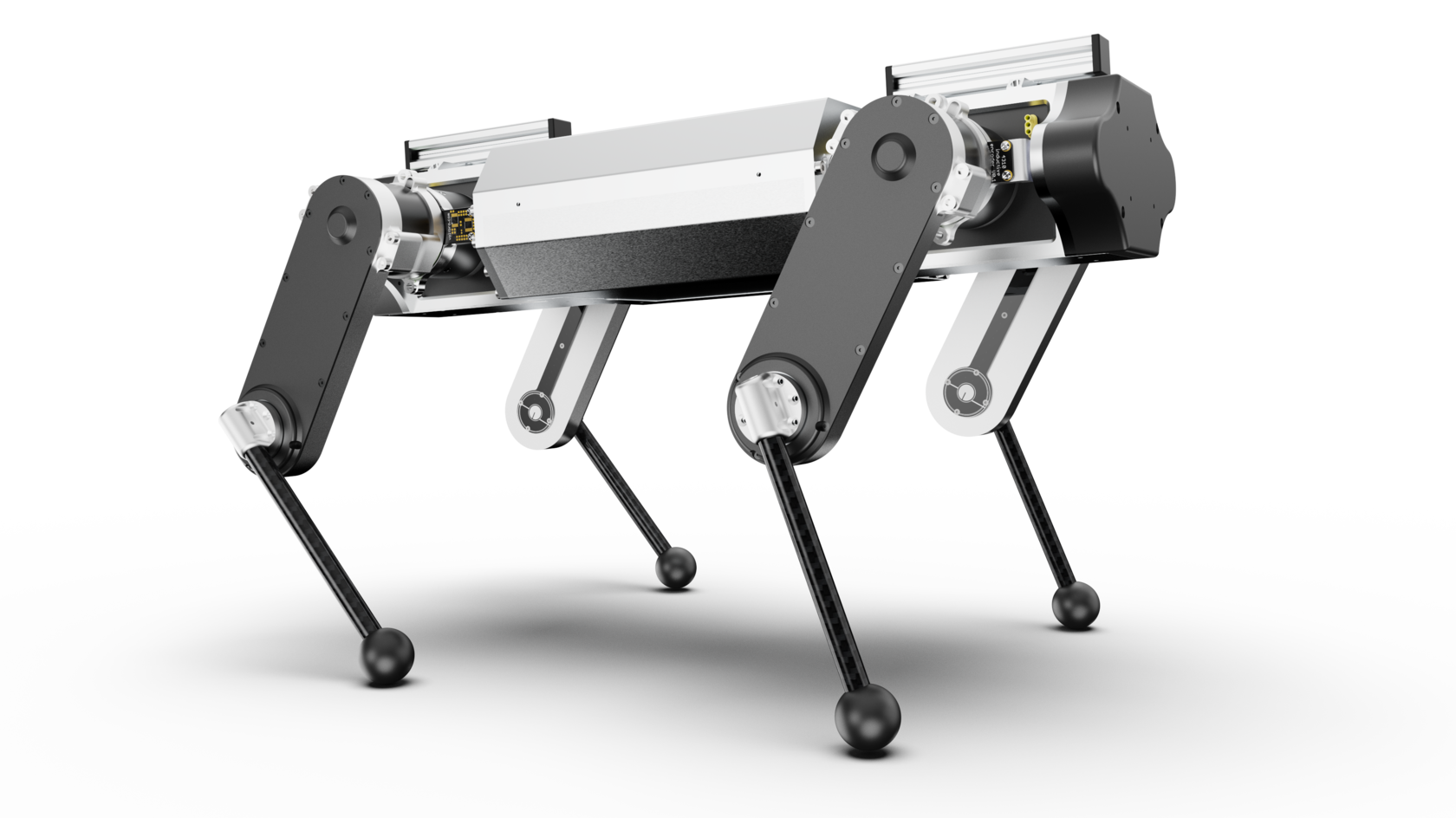
Устройство предназначено для изучения кинематики работы шагающих систем и разработки алгоритмов их движения.
Несущее шасси корпуса из алюминия. Конструкция конечностей аппарата шагателя с двумя подвижными суставами. Подвижность плечевого сустава в двух плоскостях. Подвижность коленного сустава в одной плоскости. Приводы конечностей с шаговыми двигателями, максимальный крутящий момент двигателей до 6 Нм. Микрокомпьютер, Х86-процессор с 64-битной архитектурой на борту. Система воздушного охлаждения. Блок аккумуляторов 6S1P 20A.
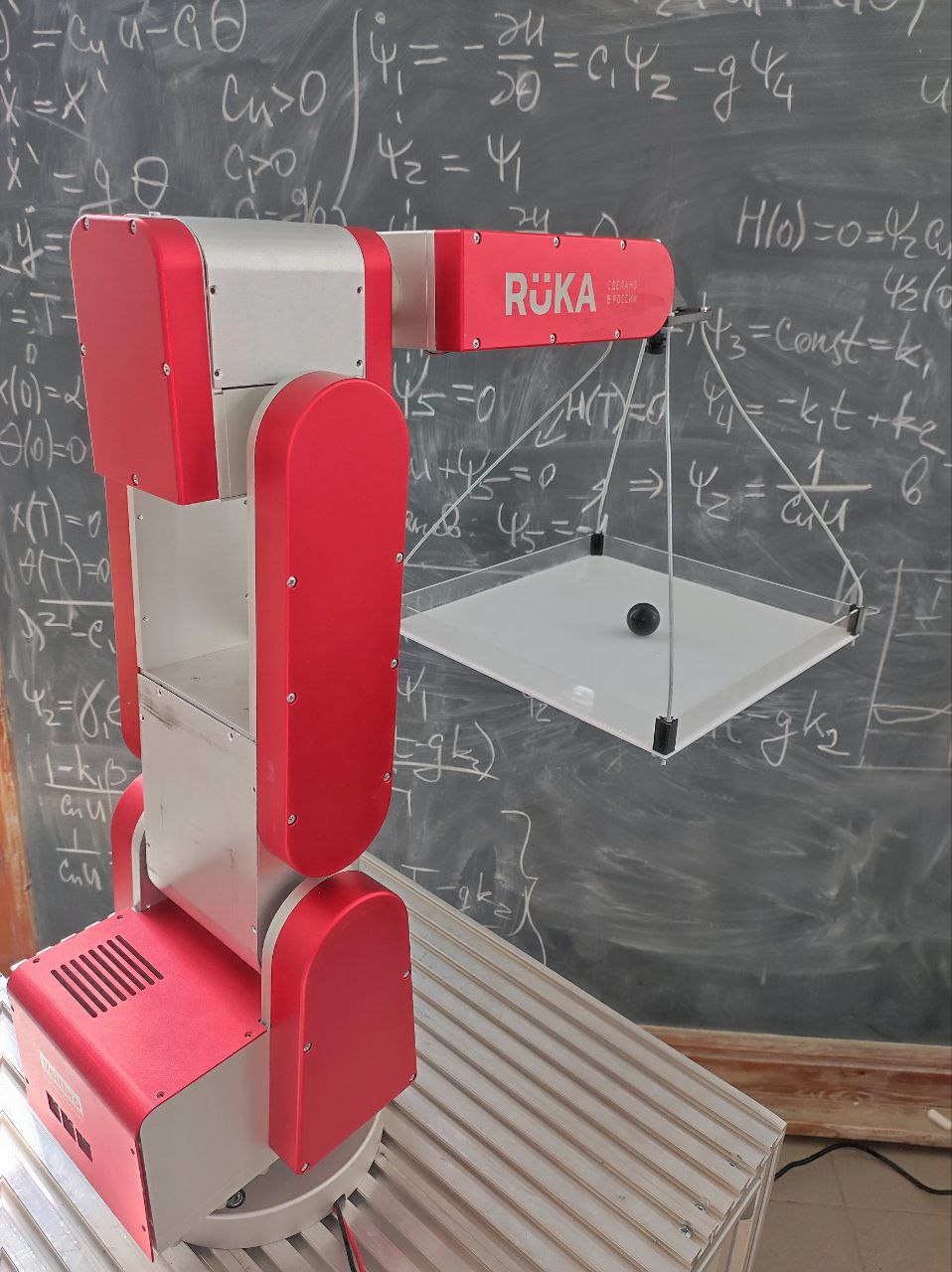
RUKA позволяет изучать работу промышленных роботов на различных уровнях. В первую очередь, это программирование робота на сервисном уровне, т.е. создание программ перемещения звеньев робота в режиме прямого программного управления или создание программ перемещения схвата манипулятора для обеспечения перемещения по требуемой траектории с использованием встроенных программных модулей.
Устройство управляется через фреймворк MoveIT2 метаоперационной системы ROS2.
Устройство имеет 6 подвижных звеньев и 2 типа захвата для перемещения небольшого груза, смонтированных на 6-м звене.
Максимальный рабочий вылет манипулятора ~ 60 см.
Рабочая грузоподъемность 2 кг.
Максимальный крутящий момент привода первого звена устройства в режиме удержания - 11.96 Н*м
Максимальный крутящий момент привода 6-го звена устройства в режиме удержания - 1.4 Н*м
Устройство может быть сконфигурировано и установлено в качестве навесного оборудования (полезной нагрузки) на колесную мобильную платформу "Исследователь"
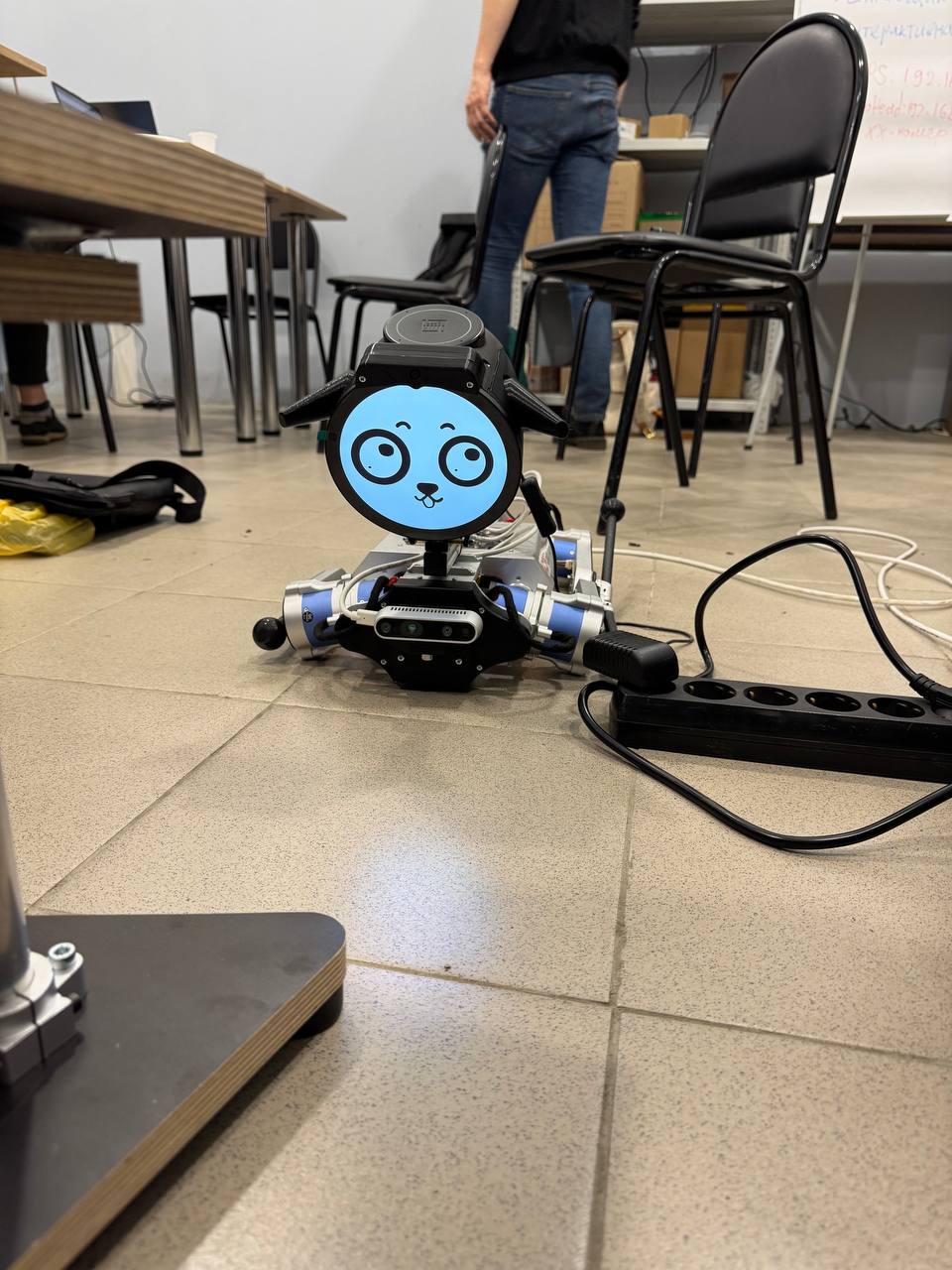
Роботизированная голова предназначена для взаимодействия робота с человеком. На устройстве размещены микрофонный массив, сенсорный экран, динамики, сервоприводы для поворота головы и ушей. Доступны пакеты для работы с ROS, взаимодействие с chatGPT.
Стенд позволяет изучить основы программирования систем управления для двигателей разных типов и освоит коммуникации по шине CAN. Поставляется вместе с блоком питания, программаторами и методическими материалами
Конструктор мобильной платформы на модулях VBCores "КубРоша"
Устройство для сборки и отладки робота на ROS2. Устройство поставляется в разобранном виде без предварительного установленного ПО. Робототехнический конструктор позволяет собрать колесную платформу, а также также может быть использован в участии всероссийского чемпионата по космической робототехнике "Кубок роверов" www.roverchallenge.ru
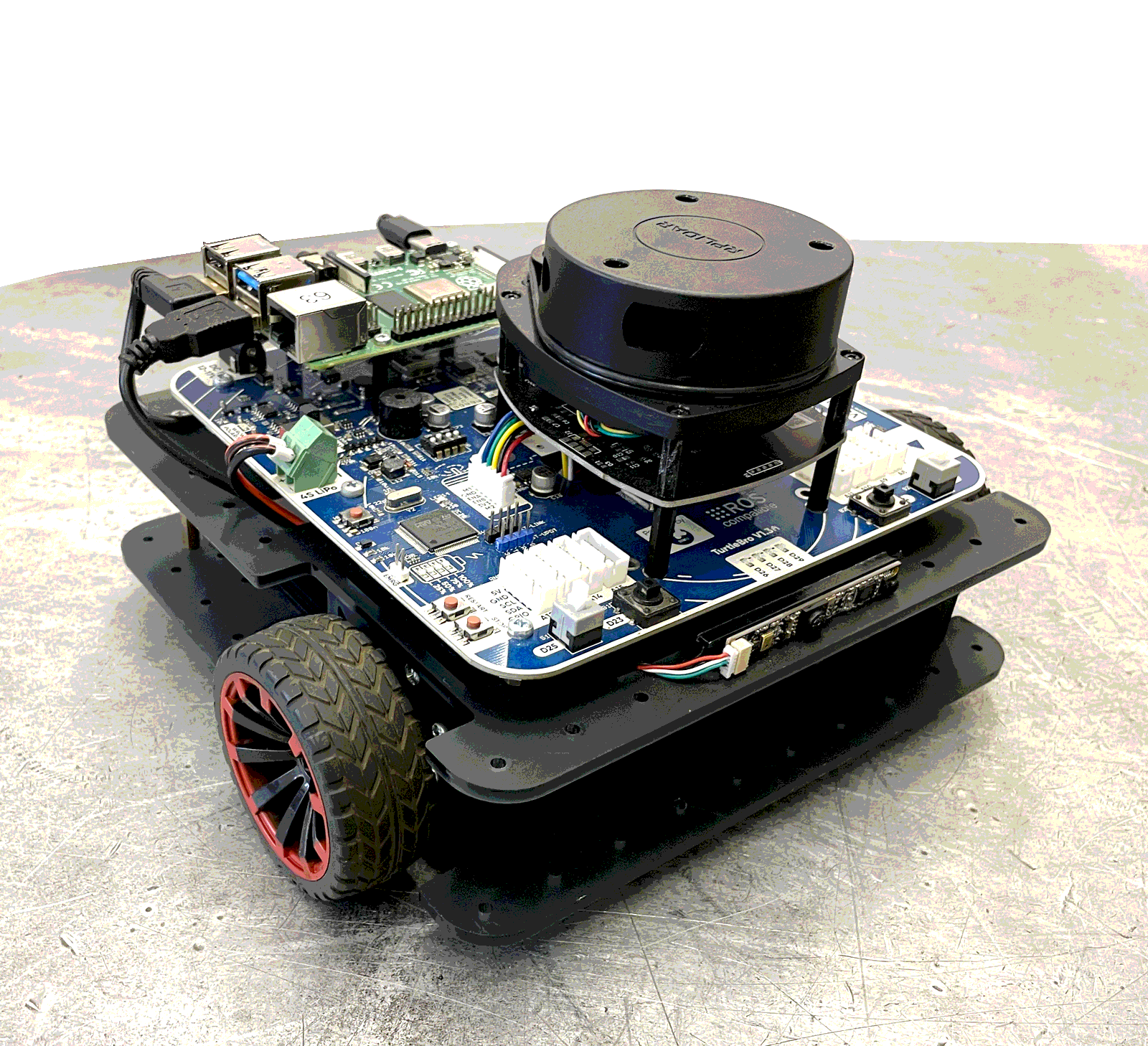
Аппаратная платформа для изучения Robot Operation System (ROS), OS Linux, и принципов программирования современной робототехники.
Робот TurtleBro полностью совместим с TutrleBot и всеми соответствующими пакетами ROS.
2-колесная робототехническая платформа одноплатный компьютер с 4-ядерным процессором интегральная плата управления с микроконтроллерами типа STM32F4 лазерный лидар с углом сканирования 360 град инерционный датчик IMU 10DOF камера с USB-интерфейсом
Набор пластиковых деталей 2-колесной робототехнической платформы одноплатный компьютер с 4-ядерным процессором интегральная плата управления с микроконтроллерами типа STM32F4 лазерный лидар с углом сканирования 360 град камера с USB-интерфейсом колеса крепления колес
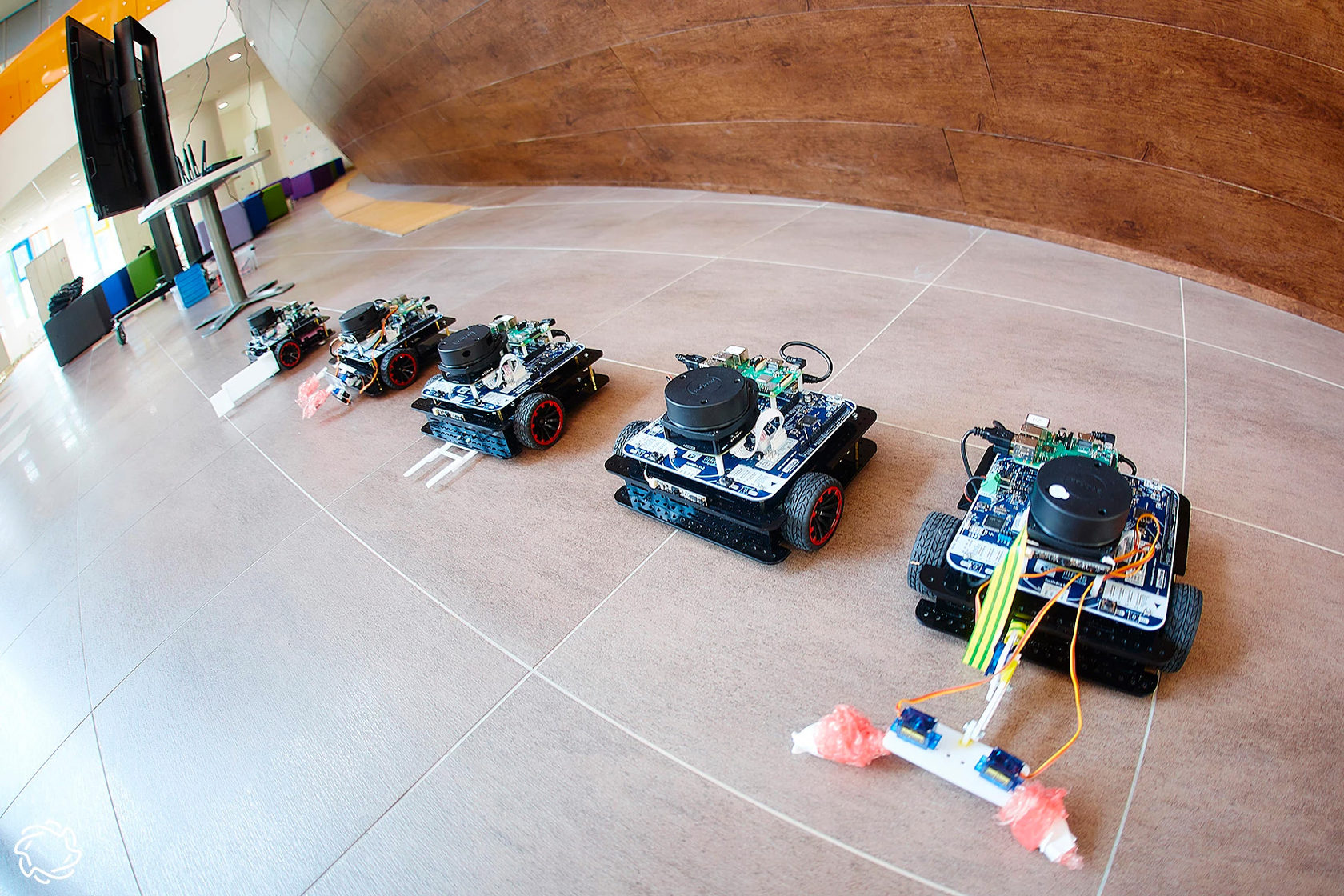
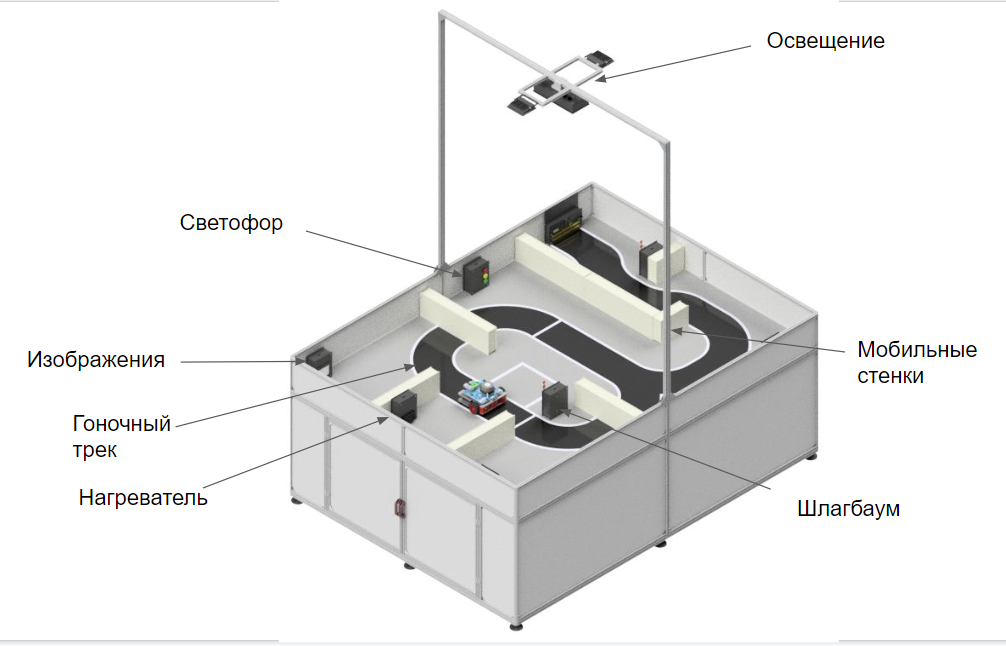
Стол - ячейка интерактивного полигона, совместимая с колесной робототехнической платформой для изучения Robot Operating System Элементы освещения Интерактивные элементы совместимые с робототехнической платформой для изучения Robot Operating System Элементы лабиринта
Диагональ экрана не менее 14 дюймов 2-ядерный процессор или более производительный объем ОЗУ 4 Гб или более объем ПЗУ 124 Гб или более Предустановленное ПО для изучения робототехники с открытым исходным кодом
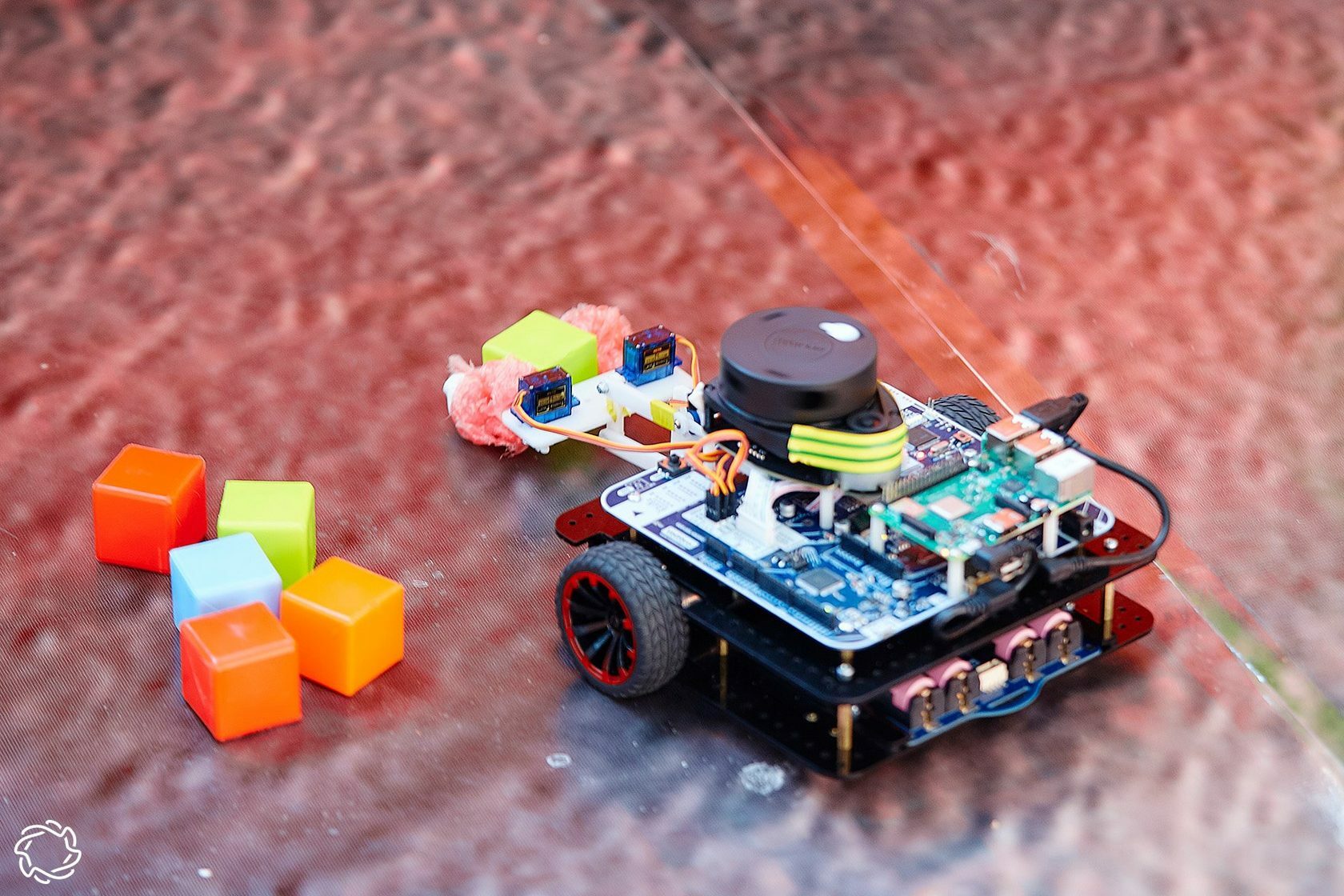
Комплект расширения для сборки полезной нагрузки "Робот-курьер" для робота TurtleBro для подготовки к компетенции "Эксплуатация сервисных роботов"
Набор полезной нагрузки в составе: пластиковых элементов, навесного оборудования, элементов крепления, кабелей, сенсоров, аудиосистемы, специализированного программного обеспечения